树莓派+二自由度云台小车(总)--准备及说明
小车实现思路
: (一)主要是一些环境的搭建以及基本知识
: (二)使小车能够运动
: (三)二自由度云台及摄像画面的传输
: (四)传感器的配置及简单的避障算法
: (五)将操纵功能集成到网页上(也可以做一个简单的app在手机上进行操作)
: (附)人脸识别、目标追踪,语音识别控制值小车、通过卷积神经网络实现自动避障等功能;(可自行发挥,本文暂无涉及)
树莓派
| 主要器件 | INFO |
|---|---|
| 树莓派4B | 1G版本即可运行,程序运行时RAM开销约250M |
| SD/TF卡 | 用于存储系统及文件,32G即可 |
| 充电宝 | 用于给树莓派供电(无自动电压调节的建议不要同时供电给驱动板) |
| T型GPIO拓展版+面包板 | ==选配== 方便连线及维护 |
| HDMImini线 | ==选配==,用于树莓派连接显示屏使用 |
| 树莓派外壳+散热 | ==选配==树莓派4B发热严重,为保证稳定及树莓派安全 |
小车所需
| 小车运动需要 | INFO |
|---|---|
| 直流电机加轮子 | 普通轮子即可(可选配麦克纳姆轮,灵活性更高,本文不涉及) |
| L298N驱动板 | 用于连接电机,供电模块和树莓派 |
| 9V~12V锂电池+DC电池座+DC电源母头 | ==选配==,用于给驱动板供电驱动直流电机(建议有) |
二自由度云台
| 实现视频功能 | INFO |
|---|---|
| 树莓派CSI摄像头 | 免驱的,比较方便(也可使用USB摄像头) |
| 伺服舵机 | 用于控制云台的水平及竖直方向的运动(本文选用MG90S) |
| 二自由度云台支架 | 与摄像头和舵机组合成二自由度云台 |
| FFC/FPC软排线 15P | ==选配== CSI自带线过短,建议购买30CM线备用 |
传感器
| 用于避障功能 | INFO |
|---|---|
| HC-SR04 | 测距,用于避障 |
| 红外传感器 | ==选配== 用于正前方避障 |
| AD数模转换 | ==选配==当需要使用红外传感器获得具体距离时,选配 |
其余部件
| 小车驱干 | INFO |
|---|---|
| 小车底盘板 | ==选配==建议两块铝合金,亚克力板易碎 |
| M3铜柱包 | ==选配== 铜柱+螺母,用于支架 |
| 杜邦线 | ==选配==建议各种类型都购买 |
连接需要
| 用于小车的组装 | INFO |
|---|---|
| 胶枪 | ==选配== |
| 电烙铁 | ==选配== |
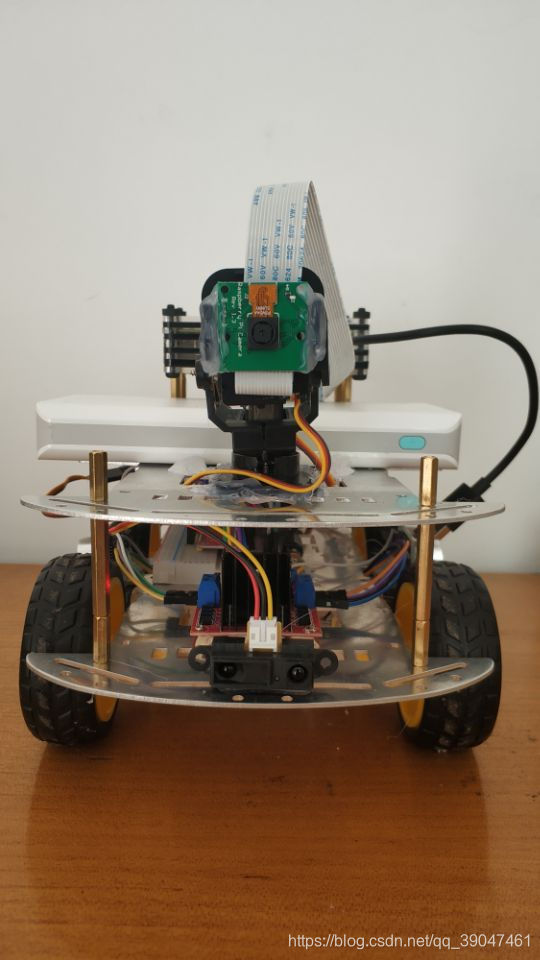
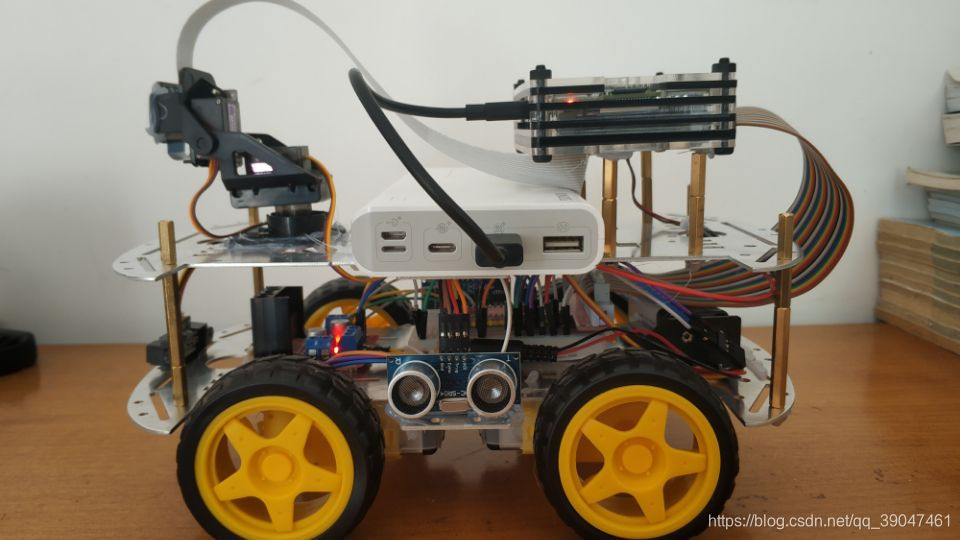
成品图

树莓派引脚图
可以在树莓派中输入查询引脚指令命令:
①使用之前需要进行库的安装配置,输入命令
1 | sudo apt-install python-rpi.gpio python3-rpi.gpio |
②然后对wiringpi版本进行升级,输入命令:
1 | wget https://project-downloads.drogon.net/wiringpi-latest.deb |
③安装完成之后可以查询树莓派的硬件引脚图,树莓派40PIN口如图3-14所示,输入命令:
gpio readall

也可以,看这个

==传送门==
(一)树莓派+二自由度云台制作智能小车(一)——搭建环境
(二)树莓派+二自由度云台制作智能小车(二)——测试传感器
(三)树莓派+二自由度云台制作智能小车(三)——小车运动+简单的自动避障
(四)树莓派+二自由度云台制作智能小车(四)——二自由度云台
(五)树莓派+二自由度云台制作智能小车(五)——服务器+网页
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.
 wechat
wechat alipay
alipay
Related Articles

Comment